
OpenCV-Python 系列 十五 | 图像平滑
本文是全系列中第26 / 63篇:OpenCV-Python
- OpenCV-Python 系列 四 | 视频入门
- OpenCV-Python 系列 十二 | 图像的几何变换
- OpenCV-Python 系列 二十 | 轮廓:入门
- OpenCV-Python 系列 二十八 | 直方图4:直方图反投影
- OpenCV-Python 系列 三十六 | 哈里斯角检测
- OpenCV-Python 系列 四十四 | 特征匹配 + 单应性查找对象
- OpenCV-Python 系列 五十二 | 理解K近邻
- OpenCV-Python 系列 六十 | 高动态范围
- OpenCV-Python 系列 五 | OpenCV中的绘图功能
- OpenCV-Python 系列 十三 | 图像阈值
- OpenCV-Python 系列 二十一 | 轮廓特征
- OpenCV-Python 系列 二十九 | 傅里叶变换
- OpenCV-Python 系列 三十七 | Shi-tomas拐角检测器和益于跟踪的特征
- OpenCV-Python 系列 四十五 | 如何使用背景分离方法
- OpenCV-Python 系列 五十三 | 使用OCR手写数据集运行KNN
- OpenCV-Python 系列 六十一 | 级联分类器
- OpenCV-Python 系列 六 | 鼠标作为画笔
- OpenCV-Python 系列 十四 | 图像阈值
- OpenCV-Python 系列 二十二 | 轮廓属性
- OpenCV-Python 系列 三十 | 模板匹配
- OpenCV-Python 系列 三十八 | SIFT尺度不变特征变换
- OpenCV-Python 系列 四十六 | Meanshift和Camshift
- OpenCV-Python 系列 五十四 | 理解SVM
- OpenCV-Python 系列 六十二 | 级联分类器训练
- OpenCV-Python 系列 七 | 轨迹栏作为调色板
- OpenCV-Python 系列 十五 | 图像平滑
- OpenCV-Python 系列 二十三 | 轮廓:更多属性
- OpenCV-Python 系列 三十一 | 霍夫线变换
- OpenCV-Python 系列 三十九 | SURF简介(加速的强大功能)
- OpenCV-Python 系列 四十七 | 光流
- OpenCV-Python 系列 五十五 | 使用OCR手写数据集运行SVM
- OpenCV-Python 系列 六十三 | OpenCV-Python Bindings 如何工作?
- OpenCV-Python 系列 八 | 图像的基本操作
- OpenCV-Python 系列 十六 | 形态学转换
- OpenCV-Python 系列 二十四 | 轮廓分层
- OpenCV-Python 系列 三十二 | 霍夫圈变换
- OpenCV-Python 系列 四十 | 用于角点检测的FAST算法
- OpenCV-Python 系列 四十八 | 相机校准
- OpenCV-Python 系列 五十六 | 理解K-Means聚类
- OpenCV-Python 系列 一 | 系列简介与目录
- OpenCV-Python 系列 九 | 图像上的算术运算
- OpenCV-Python 系列 十七 | 图像梯度
- OpenCV-Python 系列 二十五 | 直方图-1:查找、绘制和分析
- OpenCV-Python 系列 三十三 | 图像分割与Watershed算法
- OpenCV-Python 系列 四十一 | BRIEF(二进制的鲁棒独立基本特征)
- OpenCV-Python 系列 四十九 | 姿态估计
- OpenCV-Python 系列 五十七 | OpenCV中的K-Means聚类
- OpenCV-Python 系列 二 | 安装OpenCV-Python
- OpenCV-Python 系列 十 | 性能衡量和提升技术
- OpenCV-Python 系列 十八 | Canny边缘检测
- OpenCV-Python 系列 二十六 | 直方图-2:直方图均衡
- OpenCV-Python 系列 三十四 | 交互式前景提取使用GrabCut算法
- OpenCV-Python 系列 四十二 | ORB(面向快速和旋转的BRIEF)
- OpenCV-Python 系列 五十 | 对极几何
- OpenCV-Python 系列 五十八 | 图像去噪
- OpenCV-Python 系列 三 | 图像入门
- OpenCV-Python 系列 十一 | 改变颜色空间
- OpenCV-Python 系列 十九 | 图像金字塔
- OpenCV-Python 系列 二十七 | 直方图-3:二维直方图
- OpenCV-Python 系列 三十五 | 理解特征
- OpenCV-Python 系列 四十三 | 特征匹配
- OpenCV-Python 系列 五十一 | 立体图像的深度图
- OpenCV-Python 系列 五十九 | 图像修补
目标
学会:
– 使用各种低通滤镜模糊图像
– 将定制的滤镜应用于图像(2D卷积)
2D卷积(图像过滤)
与一维信号一样,还可以使用各种低通滤波器(LPF),高通滤波器(HPF)等对图像进行滤波。LPF有助于消除噪声,使图像模糊等。HPF滤波器有助于在图像中找到边缘。
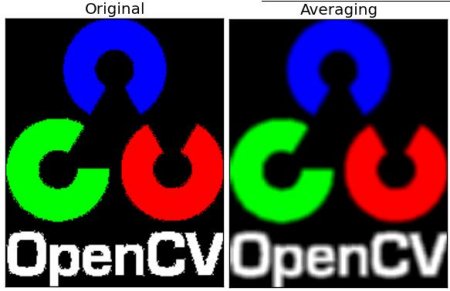
OpenCV提供了一个函数cv.filter2D来将内核与图像进行卷积。例如,我们将尝试对图像进行平均滤波。5×5平均滤波器内核如下所示:
$$
K = frac{1}{25} begin{bmatrix} 1 & 1 & 1 & 1 & 1 \ 1 & 1 & 1 & 1 & 1 \ 1 & 1 & 1 & 1 & 1 \ 1 & 1 & 1 & 1 & 1 \ 1 & 1 & 1 & 1 & 1 end{bmatrix}
$$
操作如下:保持这个内核在一个像素上,将所有低于这个内核的25个像素相加,取其平均值,然后用新的平均值替换中心像素。它将对图像中的所有像素继续此操作。试试这个代码,并检查结果:
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt
img = cv.imread('opencv_logo.png')
kernel = np.ones((5,5),np.float32)/25
dst = cv.filter2D(img,-1,kernel)
plt.subplot(121),plt.imshow(img),plt.title('Original')
plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(dst),plt.title('Averaging')
plt.xticks([]), plt.yticks([])
plt.show()
结果:
图像模糊(图像平滑)
通过将图像与低通滤波器内核进行卷积来实现图像模糊。这对于消除噪音很有用。它实际上从图像中消除了高频部分(例如噪声,边缘)。因此,在此操作中边缘有些模糊。(有一些模糊技术也可以不模糊边缘)。OpenCV主要提供四种类型的模糊技术。
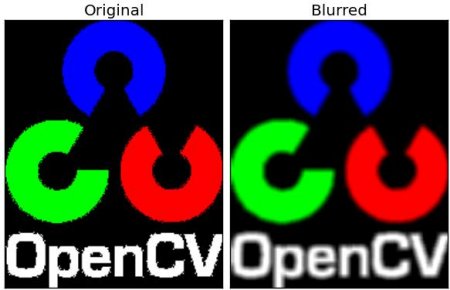
1.平均
这是通过将图像与归一化框滤镜进行卷积来完成的。它仅获取内核区域下所有像素的平均值,并替换中心元素。这是通过功能cv.blur()或cv.boxFilter()完成的。检查文档以获取有关内核的更多详细信息。我们应该指定内核的宽度和高度。3×3归一化框式过滤器如下所示:
$$
K = frac{1}{9} begin{bmatrix} 1 & 1 & 1 \ 1 & 1 & 1 \ 1 & 1 & 1 end{bmatrix}
$$
注意
如果您不想使用标准化的框式过滤器,请使用cv.boxFilter()。将参数normalize = False传递给函数。
查看下面的示例演示,其内核大小为5×5:
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
img = cv.imread('opencv-logo-white.png')
blur = cv.blur(img,(5,5))
plt.subplot(121),plt.imshow(img),plt.title('Original')
plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(blur),plt.title('Blurred')
plt.xticks([]), plt.yticks([])
plt.show()
结果:
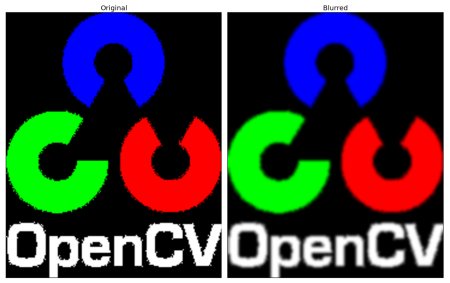
2.高斯模糊
在这种情况下,代替盒式滤波器,使用了高斯核。这是通过功能cv.GaussianBlur() 完成的。我们应指定内核的宽度和高度,该宽度和高度应为正数和奇数。我们还应指定X和Y方向的标准偏差,分别为sigmaX和sigmaY。如果仅指定sigmaX,则将sigmaY与sigmaX相同。如果两个都为零,则根据内核大小进行计算。高斯模糊对于从图像中去除高斯噪声非常有效。
如果需要,可以使用函数cv.getGaussianKernel() 创建高斯内核。
可以修改以上代码以实现高斯模糊:
blur = cv.GaussianBlur(img,(5,5),0)
结果:
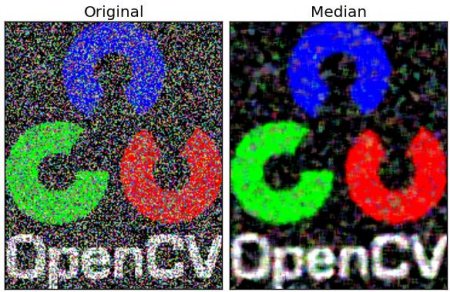
3.中位模糊
在这里,函数cv.medianBlur() 提取内核区域下所有像素的中值,并将中心元素替换为该中值。这对于消除图像中的椒盐噪声非常有效。有趣的是,在上述过滤器中,中心元素是新计算的值,该值可以是图像中的像素值或新值。但是在中值模糊中,中心元素总是被图像中的某些像素值代替。有效降低噪音。其内核大小应为正奇数整数。
在此演示中,我向原始图像添加了50%的噪声并应用了中值模糊。检查结果:
median = cv.medianBlur(img,5)
结果:
4.双边滤波
cv.bilateralFilter() 在去除噪声的同时保持边缘清晰锐利非常有效。但是,与其他过滤器相比,该操作速度较慢。我们已经看到,高斯滤波器采用像素周围的邻域并找到其高斯加权平均值。高斯滤波器仅是空间的函数,也就是说,滤波时会考虑附近的像素。它不考虑像素是否具有几乎相同的强度。它不考虑像素是否是边缘像素。因此它也模糊了边缘,这是我们不想做的。
双边滤波器在空间中也采用高斯滤波器,但是又有一个高斯滤波器,它是像素差的函数。空间的高斯函数确保仅考虑附近像素的模糊,而强度差的高斯函数确保仅考虑强度与中心像素相似的那些像素的模糊。由于边缘的像素强度变化较大,因此可以保留边缘。
以下示例显示了使用双边过滤器(有关参数的详细信息,请访问docs)。
blur = cv.bilateralFilter(img,9,75,75)
结果:
看到,表面上的纹理消失了,但是边缘仍然保留。
其他资源
- 有关双边过滤的详细信息:http://people.csail.mit.edu/sparis/bf_course/
练习题
原创文章,作者:磐石,如若转载,请注明出处:https://panchuang.net/2020/03/01/opencv-python-%e7%b3%bb%e5%88%97-%e5%8d%81%e4%ba%94-%e5%9b%be%e5%83%8f%e5%b9%b3%e6%bb%91/
