
OpenCV-Python 系列 三十六 | 哈里斯角检测
本文是全系列中第5 / 63篇:OpenCV-Python
- OpenCV-Python 系列 四 | 视频入门
- OpenCV-Python 系列 十二 | 图像的几何变换
- OpenCV-Python 系列 二十 | 轮廓:入门
- OpenCV-Python 系列 二十八 | 直方图4:直方图反投影
- OpenCV-Python 系列 三十六 | 哈里斯角检测
- OpenCV-Python 系列 四十四 | 特征匹配 + 单应性查找对象
- OpenCV-Python 系列 五十二 | 理解K近邻
- OpenCV-Python 系列 六十 | 高动态范围
- OpenCV-Python 系列 五 | OpenCV中的绘图功能
- OpenCV-Python 系列 十三 | 图像阈值
- OpenCV-Python 系列 二十一 | 轮廓特征
- OpenCV-Python 系列 二十九 | 傅里叶变换
- OpenCV-Python 系列 三十七 | Shi-tomas拐角检测器和益于跟踪的特征
- OpenCV-Python 系列 四十五 | 如何使用背景分离方法
- OpenCV-Python 系列 五十三 | 使用OCR手写数据集运行KNN
- OpenCV-Python 系列 六十一 | 级联分类器
- OpenCV-Python 系列 六 | 鼠标作为画笔
- OpenCV-Python 系列 十四 | 图像阈值
- OpenCV-Python 系列 二十二 | 轮廓属性
- OpenCV-Python 系列 三十 | 模板匹配
- OpenCV-Python 系列 三十八 | SIFT尺度不变特征变换
- OpenCV-Python 系列 四十六 | Meanshift和Camshift
- OpenCV-Python 系列 五十四 | 理解SVM
- OpenCV-Python 系列 六十二 | 级联分类器训练
- OpenCV-Python 系列 七 | 轨迹栏作为调色板
- OpenCV-Python 系列 十五 | 图像平滑
- OpenCV-Python 系列 二十三 | 轮廓:更多属性
- OpenCV-Python 系列 三十一 | 霍夫线变换
- OpenCV-Python 系列 三十九 | SURF简介(加速的强大功能)
- OpenCV-Python 系列 四十七 | 光流
- OpenCV-Python 系列 五十五 | 使用OCR手写数据集运行SVM
- OpenCV-Python 系列 六十三 | OpenCV-Python Bindings 如何工作?
- OpenCV-Python 系列 八 | 图像的基本操作
- OpenCV-Python 系列 十六 | 形态学转换
- OpenCV-Python 系列 二十四 | 轮廓分层
- OpenCV-Python 系列 三十二 | 霍夫圈变换
- OpenCV-Python 系列 四十 | 用于角点检测的FAST算法
- OpenCV-Python 系列 四十八 | 相机校准
- OpenCV-Python 系列 五十六 | 理解K-Means聚类
- OpenCV-Python 系列 一 | 系列简介与目录
- OpenCV-Python 系列 九 | 图像上的算术运算
- OpenCV-Python 系列 十七 | 图像梯度
- OpenCV-Python 系列 二十五 | 直方图-1:查找、绘制和分析
- OpenCV-Python 系列 三十三 | 图像分割与Watershed算法
- OpenCV-Python 系列 四十一 | BRIEF(二进制的鲁棒独立基本特征)
- OpenCV-Python 系列 四十九 | 姿态估计
- OpenCV-Python 系列 五十七 | OpenCV中的K-Means聚类
- OpenCV-Python 系列 二 | 安装OpenCV-Python
- OpenCV-Python 系列 十 | 性能衡量和提升技术
- OpenCV-Python 系列 十八 | Canny边缘检测
- OpenCV-Python 系列 二十六 | 直方图-2:直方图均衡
- OpenCV-Python 系列 三十四 | 交互式前景提取使用GrabCut算法
- OpenCV-Python 系列 四十二 | ORB(面向快速和旋转的BRIEF)
- OpenCV-Python 系列 五十 | 对极几何
- OpenCV-Python 系列 五十八 | 图像去噪
- OpenCV-Python 系列 三 | 图像入门
- OpenCV-Python 系列 十一 | 改变颜色空间
- OpenCV-Python 系列 十九 | 图像金字塔
- OpenCV-Python 系列 二十七 | 直方图-3:二维直方图
- OpenCV-Python 系列 三十五 | 理解特征
- OpenCV-Python 系列 四十三 | 特征匹配
- OpenCV-Python 系列 五十一 | 立体图像的深度图
- OpenCV-Python 系列 五十九 | 图像修补
目标
在本章中,
– 我们将了解”Harris Corner Detection”背后的概念。
– 我们将看到以下函数:cv.cornerHarris(),cv.cornerSubPix()
理论
在上一章中,我们看到角是图像中各个方向上强度变化很大的区域。Chris Harris和Mike Stephens在1988年的论文《组合式拐角和边缘检测器》中做了一次尝试找到这些拐角的尝试,所以现在将其称为哈里斯拐角检测器。他把这个简单的想法变成了数学形式。它基本上找到了$(u,v)$在所有方向上位移的强度差异。表示如下:
$$E(u,v) = sum_{x,y} underbrace{w(x,y)}text{window function} , [underbrace{I(x+u,y+v)}text{shifted intensity}-underbrace{I(x,y)}_text{intensity}]^2$$
窗口函数要么是一个矩形窗口,要么是高斯窗口,它在下面赋予了值。
我们必须最大化这个函数$E(u,v)$用于角检测。这意味着,我们必须最大化第二个项。将泰勒扩展应用于上述方程,并使用一些数学步骤(请参考任何你喜欢的标准文本书),我们得到最后的等式:
$$E(u,v) approx begin{bmatrix} u & v end{bmatrix} M begin{bmatrix} u v end{bmatrix}$$
其中
$$M = sum_{x,y} w(x,y) begin{bmatrix}I_x I_x & I_x I_y I_x I_y & I_y I_y end{bmatrix}$$
在此,$I_x$和$I_y$分别是在x和y方向上的图像导数。(可以使用cv.Sobel()轻松找到)。
然后是主要部分。之后,他们创建了一个分数,基本上是一个等式,它将确定一个窗口是否可以包含一个角。
$$R = det(M) – k(trace(M))^2$$
其中
- $det(M)=lambda_1lambda_2$
- $trace(M)=lambda_1+lambda_2$
- $lambda_1$ and $lambda_2$ 是 $M$ 的特征值
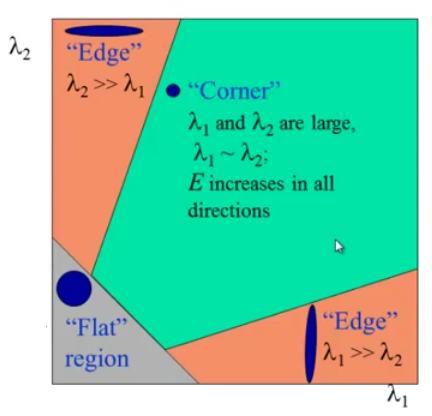
因此,这些特征值的值决定了区域是拐角,边缘还是平坦。
- 当$|R|$较小,这在$lambda_1$和$lambda_2$较小时发生,该区域平坦。
- 当$R<0$时(当$lambda_1 >>lambda_2$时发生,反之亦然),该区域为边。
- 当$R$很大时,这发生在$lambda_1$和$lambda_2$大且$lambda_1$~$lambda_2$时,该区域是角。
可以用如下图来表示:
因此,Harris Corner Detection的结果是具有这些分数的灰度图像。合适的阈值可为您提供图像的各个角落。我们将以一个简单的图像来完成它。
OpenCV中的哈里斯角检测
为此,OpenCV具有函数cv.cornerHarris()。其参数为:
– img – 输入图像,应为灰度和float32类型。
– blockSize – 是拐角检测考虑的邻域大小
– ksize – 使用的Sobel导数的光圈参数。
– k – 等式中的哈里斯检测器自由参数。
请参阅以下示例:
import numpy as np
import cv2 as cv
filename = 'chessboard.png'
img = cv.imread(filename)
gray = cv.cvtColor(img,cv.COLOR_BGR2GRAY)
gray = np.float32(gray)
dst = cv.cornerHarris(gray,2,3,0.04)
#result用于标记角点,并不重要
dst = cv.dilate(dst,None)
#最佳值的阈值,它可能因图像而异。
img[dst>0.01*dst.max()]=[0,0,255]
cv.imshow('dst',img)
if cv.waitKey(0) & 0xff == 27:
cv.destroyAllWindows()
以下三个结果:

SubPixel精度的转角
有时,你可能需要找到最精确的角落。OpenCV附带了一个函数cv.cornerSubPix(),它进一步细化了以亚像素精度检测到的角落。下面是一个例子。和往常一样,我们需要先找到哈里斯角。然后我们通过这些角的质心(可能在一个角上有一堆像素,我们取它们的质心)来细化它们。Harris角用红色像素标记,精制角用绿色像素标记。对于这个函数,我们必须定义何时停止迭代的条件。我们在特定的迭代次数或达到一定的精度后停止它,无论先发生什么。我们还需要定义它将搜索角落的邻居的大小。
import numpy as np
import cv2 as cv
filename = 'chessboard2.jpg'
img = cv.imread(filename)
gray = cv.cvtColor(img,cv.COLOR_BGR2GRAY)
# 寻找哈里斯角
gray = np.float32(gray)
dst = cv.cornerHarris(gray,2,3,0.04)
dst = cv.dilate(dst,None)
ret, dst = cv.threshold(dst,0.01*dst.max(),255,0)
dst = np.uint8(dst)
# 寻找质心
ret, labels, stats, centroids = cv.connectedComponentsWithStats(dst)
# 定义停止和完善拐角的条件
criteria = (cv.TERM_CRITERIA_EPS + cv.TERM_CRITERIA_MAX_ITER, 100, 0.001)
corners = cv.cornerSubPix(gray,np.float32(centroids),(5,5),(-1,-1),criteria)
# 绘制
res = np.hstack((centroids,corners))
res = np.int0(res)
img[res[:,1],res[:,0]]=[0,0,255]
img[res[:,3],res[:,2]] = [0,255,0]
cv.imwrite('subpixel5.png',img)
以下是结果,其中一些重要位置显示在缩放窗口中以可视化:
![]()
附加资源
练习
原创文章,作者:磐石,如若转载,请注明出处:https://panchuang.net/2020/03/25/opencv-python-%e7%b3%bb%e5%88%97-%e4%b8%89%e5%8d%81%e5%85%ad-%e5%93%88%e9%87%8c%e6%96%af%e8%a7%92%e6%a3%80%e6%b5%8b/
