

Projemizde yapılaak otonom sürüşlüaracın temel amacıinsanların herangi bir işyapmadan Araba kullanabilmesini veülkemizde Trafik kurallarına Dahaçok uyulasıdır.İkincel olarak tanımladığımız amaçiseİnsanadların kurallara uymadan yanlışhare.bu amaçlar sonucunda yapılmak istenilen Proje Bu duumlarıInsan kontrolünde Bir makinye bırakmaçalışasıdır.
kullanılaak Ekipmanlar:
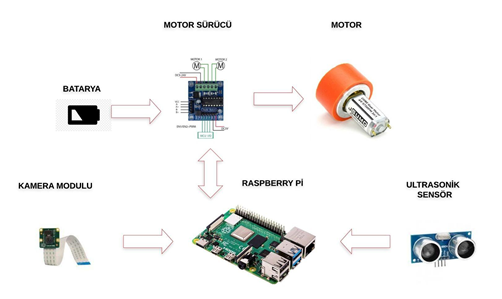
- 1 Adet RaspberryPI 3 B+
- 1名上尉卡梅拉·莫德卢(Kamera Modülü)
- 2ADET马达Sürücü
- 4台ADET直流电机
- ŞASE
- 跳线卡布洛尔
- 1辆ADET DEVRE卡丁车ı
1.覆盆子Pi TanıtımıveİşLetim Sistemi Kurulumu:
Bir adet microSD kart(en az 4 GB,8 GB olasıönerilir)alınır.Öncelikle Işletim sistemini Indirmek gerekiyor.Rasbian Işletim Sistemi Inriliyor.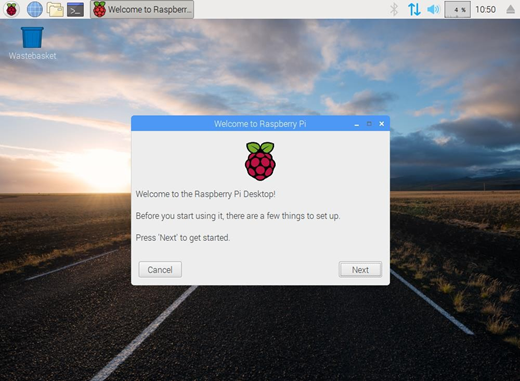
Raspbian Işletim sistemini kurmadanönce,SD Karta格式at mak gerekiyor。布农için“SD卡丁车格式化”程序ıkullanılaak。
ProgramıçalıştırıldığıNDA soldaki Gibi Bir görüntüyle karşılaşılır.SD Kart seçildikten sonra Format‘a tıKlanır.Program Içindeki bütün dosyalar silinecektir.EVET SeçeneğI Işşve biçimlendirme Işlemi başlar.BAşarılıYazısıGelince Tamam denilecektir.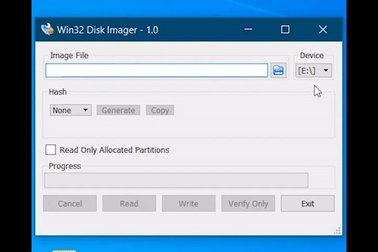
Son olarakİşletim Sistminin SD Karta YazıLMASıkalıyor.Burada da“Win32 Disk Imaginer”程序ıkullanılacaktır.Programçalıştırıldığında solda gözüktüğügibi Bir Ekran açılacaktır.图像文件sekmesinden Işletim sistemini seçtikten sonra device sekmesinden SD Kart seçilecek。ardından write tuşuna basıp işlmin tamamlanmaıbekelenir.BAşarılıYazı‘sınıgörünce Tamam seçeneğI Işarethir.
1.1.Linuxişletim Sistemi
İşletim sistemi,günümüz tekolojisin ortaya koyduğu imkânların Yazılım açısından merkezinde yer alıyor.Sadess bilgisayarlar değil Birçok farklıElektronik cihaz IşLetim姊妹船。Cihazın sahip olduğu tüm Temelözelliklerin Işlevsellik kazanomaınısağlayan Işletim妹in bilgisaylarözelinde Microsoft Windows,MacOS X ve Linux Gibi FarklıYazılım ve arayüzözelliklerine sahipçeşitleri bulunuyor.
BU Işletim Sistemiçeşitlerinin en Işlevsel olanlarından biriyse linux。fakat linux‘unçalışma prensplerine ve tatihçesine değin medenönce Genel anlamda Işletim sistminin ne işe ya adığını,kullanımının Nedenönemli olduğunu ifade etmek geerekiyor.Bu nedenle Işletim siminin tanımınıyapıp fonksiyonlarına dair DetailıBir Girişyaptıktan sonra linux‘un vadettiğIözellikleri açıklamak ya arlıolabilir.
İşletim Sistemi Donanım Kaynaklarınıyöneten ve FarklıUyulamalar Için yaygınşekilde kullanılan servisleri sağLayan Bir Yazılım bütüolarak ifade edilebilir.İşletim ssistminde uyulama kodlarıbüyük oranda doğrudan donanım tarafından yürütülüyor.Ayrıca Işletim Sistemi,Girdiçıktıve Bellek Atama Gibi Donanımözelliklerini kontrol Eden Uyulamalar ve bilgisayar arasında köprügörevi görüyor.
ım iletişim ağının merkezinde yer alan unsur olarak düşüldüğünde Işletim Sistemi kullanıcıdan uyulamaya uyulamadan da Donanıma verilecek komutun AracılığınısağLayan Parça hâline Geliyor.Nitekim herangi Bir Işletim sistemini Işlevselliğinin genişliğiyle değil kullanıcıTarafından belirli Bir amaçdoğrultusunda iletilen komutu program lama kapasitesiyle değerlendirmek daha sağlıKLıBir Yazılım Yaklaşımıolarak喀布尔ediliyor.
İşletim Sistemleri sadess bilgisayar,Oyun konsolu,cep telefonu ve internet sunucularıdeğil arba,beyaz eşyalar ve kol saatlerinde de kullanılıyor.1940年‘larda hiçbir Elektronik cihazın Işletim Sistemi yoktu fakat Programlanabilir bilgisayarın keşfinden sonra ikili sayı(0 Ve 1)Makine Dili OluşturulmaıIşletim Sistemi teknolojileri Içinönemli Bir adımıortaya koydu。
1.1.1。Linux Nedir?
LINUX,bilgisayar Işletim sistemlerinin Temel ParçasıOlançekirdek YazılıMlarından Biri.SERBESTçe dağıtılabilen,çok görevli veçok kullanıcılıUNIX ortamının Bir türevi Olan Linux günümüzde Dahaçok Bilişim unzmanlarıtarafından tercih ediliyor.ğıtıma sahiolduğu gibi açık kaynak kodlarıda kullanan linux,kullanıcılar tarafından tekrar Program lanabilmeyi ve Geliştirilebilmeyi mümk kılıyor.
LINUX Işletim siminin en büyüközelliğI açık Kaynak kodlu olasıve tamamucretsiz olasıya daçok düşük Birücrete satın alınabilmesi。Buçok büyük Bir avantajçünkülinux‘unücretsiz olasınısağlayan yaklaşım,Işletim sistminde kullanılaak程序员ıdaücretsiz hâle getiriyor。Ayrıca Linux sistem hatalarına karşıoldukça DayanıKLıBir Yazılım.kolay kolayçökmemesi kullanıcıların linux‘u tercih etme nedenleri arasındaön planaçıkıyor.BirkaçfarklıProgramıAynıandçalıştıRdığınızda bilgisayarınızın sorunsuzşekildeçalışmaydevam etmesini sağlıyor.Sistem hatalarınıönlemekte deçok başarılıolan Linux Yazıeditörleri,çizim YazılıMları,he ap cetvelleri ve veri tabanlarıgibi birçok farklıihtiyaca cevap verior.
1.1.2。覆盆子皮尼迪尔?
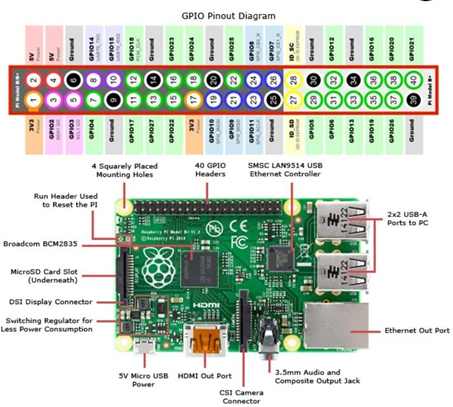
Ozgür YazılıMlarüzerindeçalışan bu mini bilgisayar,1080P VideolalıbilirahatlıKla Oynatability ecek güce saship。İşletim sisteminiüstünde takılan microSD‘de karttaşıyan bu bilgisayarıküçük boutları说,在她的Zaman yanınızda taşıyabilirsiniz中。所以ğutucu fanıya da hareketli parçasıolmadığıiçin Sessizçalışan Raspberry Pi,Bir Kişisel bilgisayardan beklediğinizçoğuözelliği karşılıyor.树莓Pi‘yi Normal Bir bilgisayar olarak ya daüstündeki pinleri kullanarak Kendi Elektronikçözümlerinizi Geliştirmek Için Bir Platform olarak kullanabilininiz.
Orneğin Raspberry Pi 3‘ün Tekniközellikleri aşağıDaki gibidir:
- 64位四核ARMv8 işLEMCI
- 1.2GHz
- 1 GB RAM
- DâHili WiFi-BCM43143
- 蓝牙4.1(蓝牙低能耗-BLE)
- 40 ADET GPIO
- 4个ADET USB 2
- 4 uçlu Stereoçıkışıve Kompozit Videoçıkışı
- kamera bağlantısıiçin CSI kamera Portu
- 7“Dkunmatk Ekran Için DSI Ekran Portu
- Micro SD Soketi
- Güncellenmişgüçkatı(2,5A‘e Kadar destekliyor.)
2.2.树莓派3-GPIO Pinlerinin Kullanımı
覆盆子Pi‘deki GPIO Konektöründe FarklıişLevlere sahip pinler bulunmaktadır:
- Genel amaçlıGiriş/çıkışIçin kullanablessğimiz GPIO Pinleri)
- I2C Haberleşme端口(GPIO02ve GPIO03Pinleri)
- SPI haberleşme portu(GPIO10,GIPO09 ve GPIO11 Pinleri)
- UART系列哈伯利şMe端口(GPIO14ve GPIO15Pinleri)
覆盆子皮5V 3A双适应地面VE 5V小红宝石。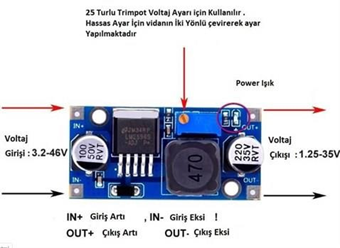
12V 20000mah Bir Pil kullanılarak,çıkışıayarlanılabilir regüle devresinden geçirilerek 5v 3安培靛蓝。马达sürücüler Pil Bileenirken,Rasbperry Pi regüle devresininçıkışıile Beslenir(Rasbperry Pi regüle devresininçıkışıilesenir)。
aşağıda bağlantışemasıgösterilen rem temsili olarak bağlantılantıaçıklamaktadır.4DC Motor kullanıldığıIçin 2 adet sürücükullanıldı.Araçüzerinde Tek Bir sürücüzerine AYNıSINYALLEI Gönderebilmek和ıNA电机1 VE马达2 SinYal uçları(SağTekerlek)GPIO 2,GPIO 3şEklinde kablo lehimlenerek 3 adet kablo oluşturuldu.AYNışE KILDE 3 VE电机4 Içinde AynıIşlem tekrar ediledu
VE马达Modülükodlarıile kontrolügerçekleştirildi。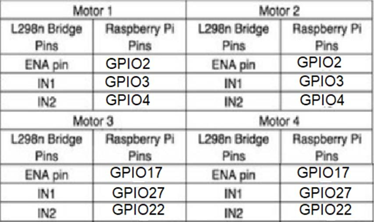

Genel tanıtıMlarımız Bittiğine göre artık Proje aşamalarından bahsedebiliriz.
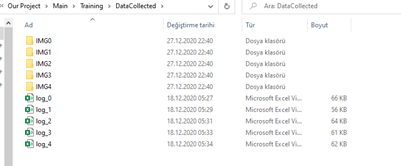
- Arcın bu bölümünde yapılmak istenilen gelecekte uyulayacağımız Train(öğRenme)bölümüne veri hazırlamaktır.
- aracın kameraından gelen görüntüleri veri olarak toplamak
- Verilerin düzenli ve sıralıhalde toplanmaı
- 指导değerleri Içerren Bir logyasıoluşturmak
- 她的Veri için tah-saat-saniye-salise belirtilp oluşturulan原木档案asındaki steating değerleri eşleştirilmesi
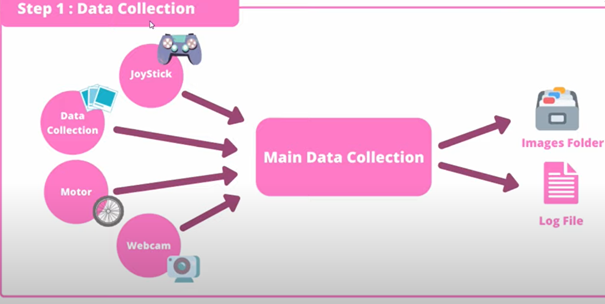
数据收集Modülleri
AMAç
- aracımızda kullanılan motorlarıkontrol edilmesi
- Hız,açı,dönüşve dönüşhız değerlerinin matematiksel heaplamalarının yapılması
算法:
- Oncelikle Temel olarak kütphaneler tanımlanmıştır scriptimizde RPI.GPIO马达sürücütüphanesi kullanılmıştır.
- 马达adında bir class oluşturulur ve içine fonksiyonlarımız Yazılır;
__init__Fonksiyonu:马达sürücülerinin tanımlanıp hani yönün ileri ve hani yönün Tersi olacağıayarlanır.
Move Fonksiyonu:Komutumuzda ise hız ve dönşhızlarının YazıldığıBir fonksiyondur.3adet Girdisi vardır Tekçıktısıvardır.
速度:verecek olduğumuz hız parametredir.
转弯:DönüşIçin Hesaplamaya girihızıayarlayacak parametredir.
T:在ıLMASıIçin Kullanılaak Olan Parametredir延误。
- Maximum hızımız100ileri yönde ve Tersi yönde-100olarak sabitlenmiştirüstüneçıkan değerlerde+-100şeklinde Geri dönüşalınacakşekilde Yazılmıştır.
Stop Fonksiyonu:bu fonksiyonda stop verdiğimizde motorların duracağıkomut Yazılmıştır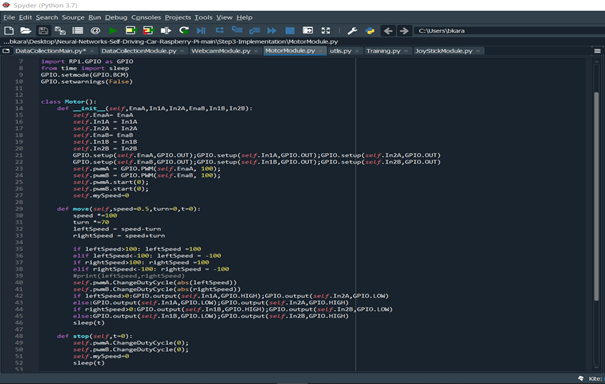
AMAç:
- 操纵杆modülümün Yazılışamacıverilerimizi(fotoğraf ve direksiyon açılarımız)kaydemek için Aracın joyticle sürüşünüsağLamak ve bu操纵杆deki轴线değerlerini yani projemizde kullanacağımız direksiyon(Steering)açı
- 游戏杆tuşlarına yönler(Aaxiller)ve Kayıt tuşu atanacaktır
- kullanılan bu modüle‘de pyGame ve time kütüphaneleri kullanılacaktır.
算法:
- 游戏时间kütüphanelerimiz进口Edilecektir。
- PYGAME:PYGAME Kütüphanesi Raspbberry Pi içinüretilmişkonsol kütüphanesidir。
- 操纵杆Tanımlanır.
- ğerleri tanımlanır.
getJS Fonksiyonu:Butonlar devreye alınır Share tuşunaıldığıve bırakıldığıandkayıt altına alıp kameranınçalıştırılmasıve direksiyon açılarının aktif kayıt altına alınması
主营房:kontrol amaçlıkullandığımız fonksiyon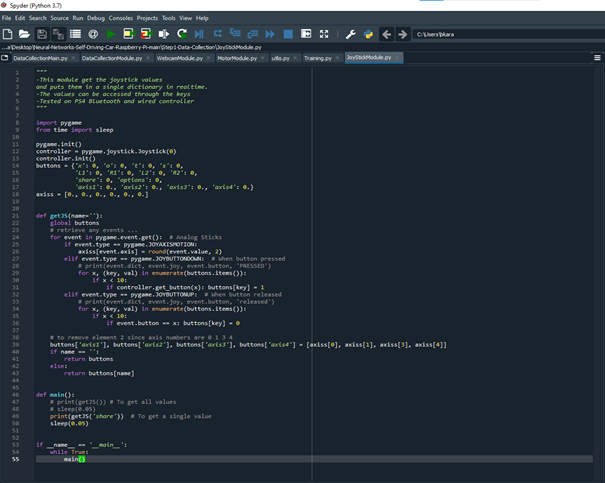
AMAç:
- Kamera modülümüzün Yazılışamacıkameramızıaktif olarakçalıştırıp,verileri kayıt altına alma işlemi gerçekleştirmektir.
算法:
- Kütüphane olarak OpenCV Kütüphanesi进口版。
- Cap değişkeni kameramız olarak at anır
Getimg Fonksiyonu:Ekrana gösterme seçeneğimiz kapalıolacağıiçin false Yazılır,Kameramız[480,240]görütüalacakşekilde ayarlanır.İMg değIşKen CV2şeklinde resize edilerek 480,240şeklinde Kayıt edilir.
Main Fonksiyonuna bağlantıyapılır.
AMAç:
- Verilerin Nasıl Kayıt edilessğve nasıl düzenlessğini ayarlamak Için Yazılmışmodüldür.
- Modüllerimiz arasında en unun olanıve temel data Mining dediğimiz aşama bu koddan oluşuyor.
算法:
- Kütüphanelerimiz tanımlanır bunlar:熊猫,os,cv2,日期时间
- 计数文件夹oluşturulur img列表i oluşturulur。
- kaydedicecek path(Yol)tanımlanır.
- 而döngüsüve os.Komutuyla Birlikte bulunduğumuz dosya içerisine CountFolder 1 artacakşekilde döngükurulur
- “Yeni Yol=Benimyolum+/img+str(CountFolder)”她的Scriptçalıştırıldığında CountFolder kaçise onu+1 Arttıracakşekilde dosya açılır.
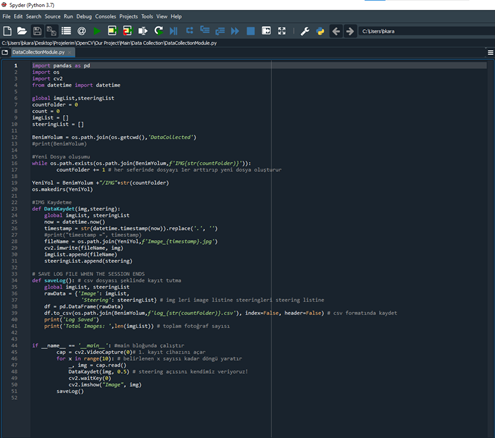
1.DataKaydet Fonksiyonu:2 ADET VARD VARDır;İmg ve Steering
- Şwanki zaman tanımlanır
- Tanımlanan zamandaki.Işaretleri boşluk olacakşekilde değIştirilir.
- Yeniyol Içerisindeçekilen Her Rem Unique(Benzersiz)olacakşekilde“Image_(Şuanki Zaman).jpgşeklinde kayıt edilir
- yazdırılır ve filename içerisinde imgList‘e append edilir.
2.saveLog Fonksiyonu:
- Steering değerleri de CSV FILE Içerisine ve Steering List e kaydediecekşekilde düzenlenir.
- Bu düzenlemeed yukarıDaki Gibi Hresme karşılık Gelen Bir Steering değeri olacakşekilde isimlendirilir.
AMAç:
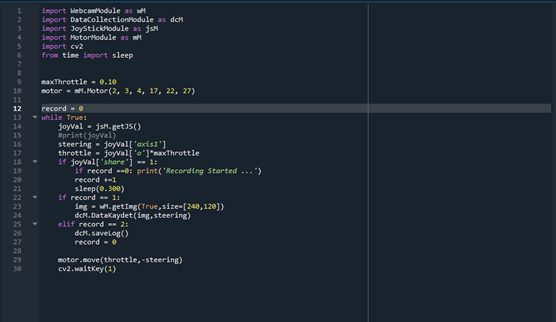
- Bütün modüllerin(Python Scriptlerinin)BirBirine bağlanarak hep beraberçalıştığıpython scriptidir.
算法:
- Kullanılan bütün Modüller Bu bloğaİmport edilir.
- 最大油门tanımlanır
- 马达平乐丽tanımlanır.
- 记录0 olarak tanımlanır(Döngüdeğerlerine göre modüllerçağırılakağıiçin)
- Döngüiçerisinde Joytick değerlerininçekilebilmesi Için操纵杆modülünden get JS fonksiyonuçekilir。
- Steering değeriçağırılan getJS fonksiyonun axis1 değeri olarak tanımlanır.
- Thttle değeriçağırılan getJS fonksiyonundaki o değeriçarpımaxThrottle olarak tanımlanır.(布农内德尼模拟Hassas olduğu için ileri doğru gitmeyi joystikteki O tuşu ile gerçekleştirmek istenmesi)
- unağırılan getJS fonksiyonundaki Share değeri 1 olursa Kayıt başve Gelen Veriler Data Collection ModülüTarafından kaydediir
- Motorun Hreketi Motor ModülündençağırıLan Move Fonksiyonuna Girilen Ve Steering değerleri Tarafından gerçekleşir
AMAç:
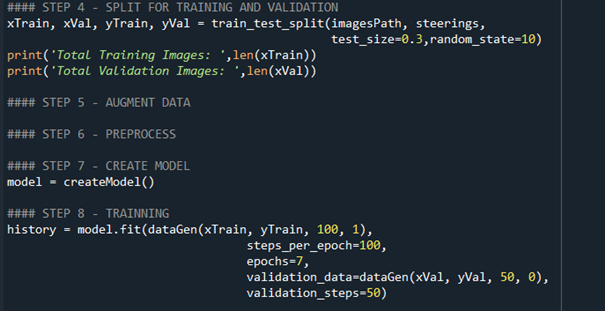
- Datalarımızda istenilen değerleri y değeri geriye Kalan değişkenleri fotoğraflarımız ve ve direksiyon açılarımızıx değeri olarak Train_TEST_SPLIT Metoduyla ayırma.(%33test etme,%67öğretmek)
- Yapay Sinir Ağıiçin hani modi kullanacağımızıtasarlamak.
- Seçtiğimiz en Iyi Modeli Yazmak(TensorFlow)。
- Dahaönceki sunumuzda Elde ettiğimiz datalarımızı“csv-Steering ve path-Image”kurmuşolduğumuz yapay sinir ağıModeline(TensorFlow)gydi olarak vermek.
- vermişolduğumuz bu inputlardan Birçıktıelde ederek bunu h5格式ında kaydemek
- 实现aşamasından sonra tekrarlanacakşekilde en Optimize Ave Batch Size‘ınıBulmak(Modeli Optimize Etmek)。
Kullanacak olduğumuz Temel 2 adet modül vardır,Bu modüllerçok ağır işlem güçleri gerektirdiğiçin RaspbberryPiüzerinde kullanılamaz.
AMAç:
- Modülde datalar Sinir ağınaçekilecektir.
- Bu Yazılan modülün Içerisinde Yapay Sinir AğıModelimiz bulunmaktadır.
- Bu modül Için Datalarımız(数据交织)ILE Training.py scriptimiz AynıPathüzerinde Bulunmalıdır.
算法:
getName Fonksiyonu:AYNı路径üzerindeki数据收集üzerinden datalarımızıbu scriptin içineçağırır.
ImportDataInfo Fonksiyonu:Verilerin sütunlarıoluşturulur ve kaçadet imgx dosyamız var ise for döngüsüiçerisinde istenilen aralığa göre fonksiyona verilir ve o dosyaya kadar bütün dosyaların içerisinde x değişkenimiz gezdirilir n içerisinde x değişkenimiz gezdirilir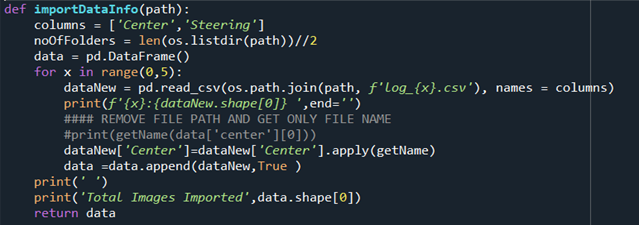
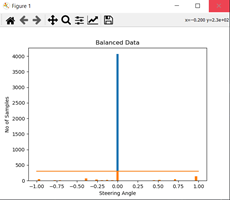
BalanceData Fonksiyonu:BU fonksiyonumuzdaki Temel amacımız oluşturuluşolan data etimiz Içerisindeçok Fazla Aynıdireksiyon açısına saship resimlerimiz varise hem ONU CSV file‘ımızdan hemde resimlerimiz arasındançıkartmak.Saintıkartmak
Nedençıkarıyoruz bu resimleri?
Yapay Sinir Ağlarında Daha Fazla AynıTip Dataaya sahiolmamız Demezberlemye(过配)Neden olabilir Yada limizdeçok Fazla 0 dönüşaçısına sahiYani düz yol resimleri bulunuyorsa açılıOlan fotoğraflarımızçok Daha az sayıday sa yapmai.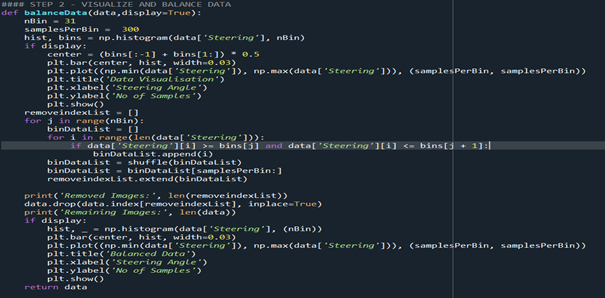
loadData Fonksiyonu:Resimler ve direksiyon açıdeğerleri verinin Içerisinde döndüşeklinde döndürülerek indexlenir ve array formatında listelere yüklenir。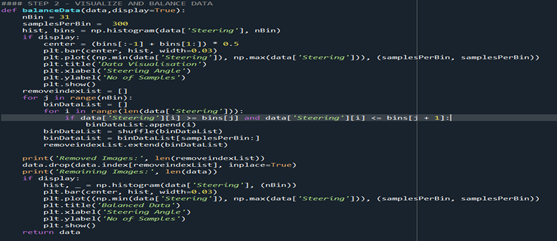
放大图像丰克西约努:Sahiolunan resimler牦牛ınlaştırılır,parlaklığıayarlanır ve işlenecek formata geçirilir。
前置处理:Yükenen resimlerüzerinde preprocess Işlemi gerçekleşir.Bu Işlem gürültüekleme,blur ekleme,resilerin büyüklüğünüayarlama ve Normizizasyondan oluşur.
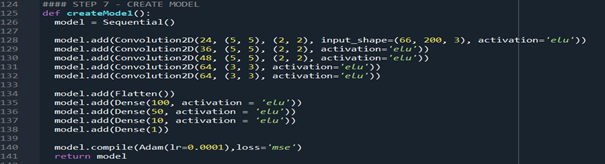
Fonksiyonu模型:BU aşAMADA Model OLUşTurulur Conv2D Layerları扁平层ıve Density LayerlarıOLUşTurulur。sırasıyla;
- (5,5)&(2,2)matrislik 24 Nöronluk输入形状‘i=(66,200,3(Rgb))Forata sahip katmanı
- (5,5)&(2,2)matrislik 36 Nöronluk Conv2D Katmanı
- (5,5)&(2,2)matrislik 48 nöronluk Conv2D Katmanı
- (3,3)Matrislik 64 Nöronluk Conv2D Katmanı
- 展平卡特曼ı
- 100Nöroona船艇Aktivasyon Fonksiyonu Relu(‘ELU’)Olan Katman OluşTurulur
- 50 Nöroona船艇Aktivasyon Fonksiyonu Relu(‘ELU’)Olan Katman OluşTurulur
- 10 Nöroona船艇Aktivasyon Fonksiyonu Relu(‘ELU’)Olan Katman OluşTurulur
- 我的儿子OLARAK 1 Nöroona帆船ıkışkatmanıverilir
- 模型编译学习速率=0.0001 Verilir,损失均方误差(‘MSE’)dkelemine göre verilir。
DATAGEN Fonksiyonu:Modelin Training Edilebilmesi Için Resimlerin Işlenmişhalli ile Steering değerlerinin eşitlendiğI fonksiyondur.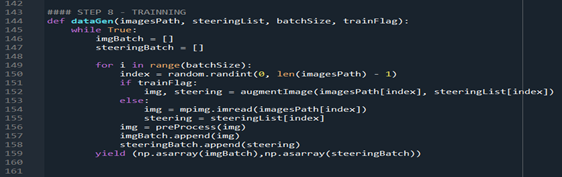
AMAç:
- YAZıLAN MODELüzerine,Modele Uygan olarak Yeniden tasarlanıLAN Datalar Importedir.
- 列车测试拆分OLUşTurulur(%30测试%70列车)
- 模型历史Plotunda ANLık olarak görüntüverecekşekilde ayarlanır.
- 型号GörselleşTirilir ve和ıMlar Izlenir。
算法:
- Kütüphaneler tanımlanır

库图法内勒
- 数据路径日志路径验证。
- Data dengelenir(Eldeçok Fazla 0 açısıvarsa bunlar azaltılarak eşit seviyeye getirilmeyeçalışılır.)
- x_Train y_Train x_TEST y_TEST olarak Dataar Ayrılır Vve Baldan Sonra ayıRdığımız Miktar ekrana yansıtılır
- 型号=列车型号olarak Tanımlanır
- 模型纪元说ısıBatch_Size‘larıBelirlenerekçalıştırılır.
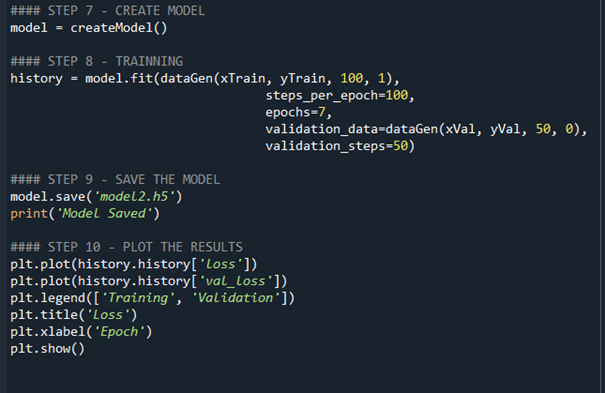
- Epoch Işlemleri Tamamlandıktan sonra model.保存模型h5 uzantılışekilde kaydediir。
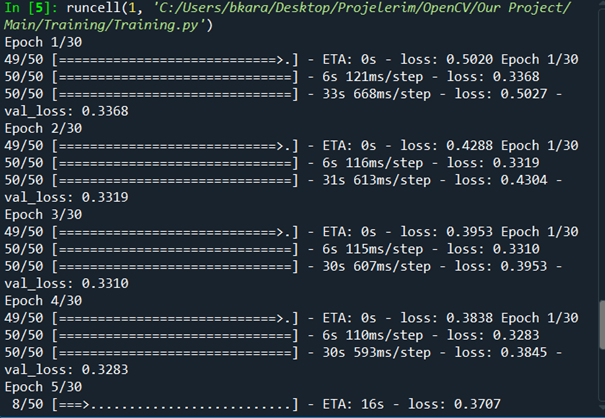
- Kaydedien模型在损失Pultuna bakıLarak en Fazla Verimi Alacağımız模型优化编辑。
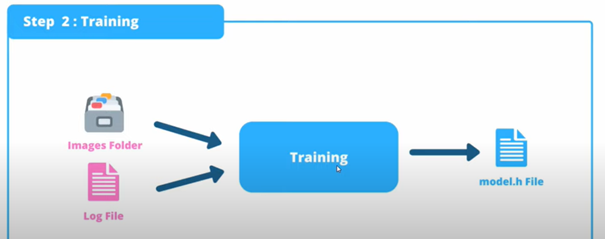
3.3。实施
AMAç:
- Elde ettiğimiz h5 Model in Flash Bellek ile Aracımıza BağlıOlan Raspbberry Piüzerine AktarıLMASı
- AktarıLan h5 model inçalışallsıIçin run main bloğu ve aktif olarak kamradan data almaıIçin kamera modülüve Modüvve Modülüve Modülüve Modülübulunur中的ınçalışMasıIçin Motor modülülübulunur。

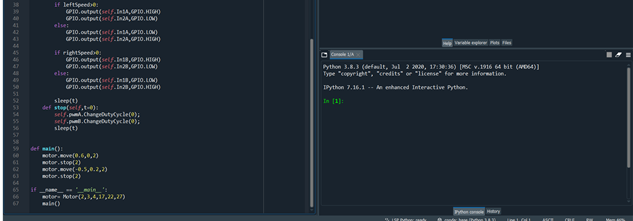
3.3.1。马达模块
马达Modülün amacıaracın马达控制脚本Scriptiüzerinden yapbilmektir。Modülüarcın dönüşaçıları,dönüşhızları,Sabit hızıgibi fonksiyonların değerlerinin heaplandığıfonksiyondur.
算法:
- Oncelikle Temel olarak kütphaneler tanımlanmıştır bu Scriptimizde RPI.GPIO马达sürücütüphanesi kullanılmıştır.Raspberry Bir bilgisasyar olduğu Gibi Aynızamanda Elektronik devrelerde kontrol kartıolarakta kullanılabilir。
- 马达adında bir class oluşturulur ve içine fonksiyonlarımız Yazılır;
导入RPI、GPIO komutuylaçağırılır.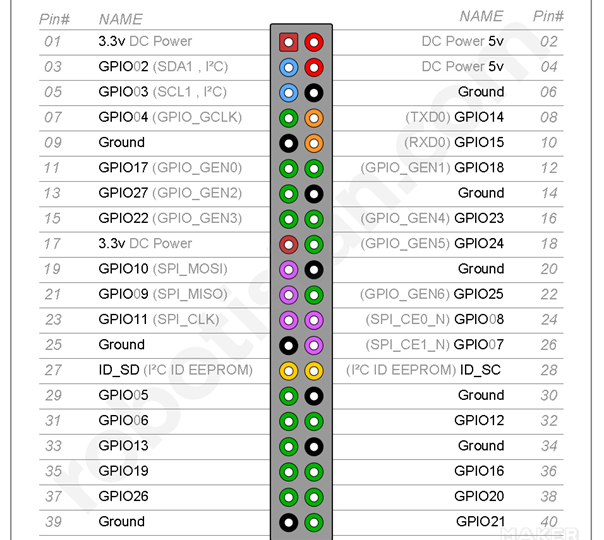
1.Fonksiyon:Motor Sürücülerinin pinlerintanımlanıp hani yönün ileri ve hani yönün Tersi olacağıayarlanır.
2.Fonksiyon:Move Komutumuzda ise hız ve dönşhızlarının YazıldığıBir fonksiyondur.3 adet Girdisi vardır Tekçıktısıvardır.
速度:verecek olduğumuz hız parametredir.
转弯:DönüşIçin Hesaplamaya girihızıayarlayacak parametredir.
T:在ıLMASıIçin Kullanılaak Olan Parametredir延误。
- Maximum hızımız100ileri yönde ve Tersi yönde-100olarak sabitlenmiştirüstüneçıkan değerlerde+-100şeklinde Geri dönüşalınacakşekilde Yazılmıştır.
3.Fonksiyon:Bu fonksiyonda stop verdiğimizde motorların duracağıkomut Yazılmıştır.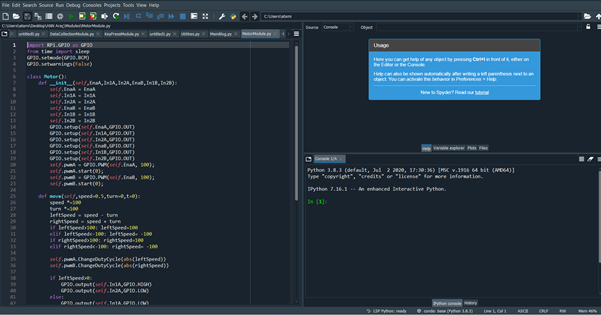
3.3.2。网络摄像头Modülü(Kamera Modülü):
AMAç:
- Kamera modülümüzün Yazılışamacıkameramızıaktif olarakçalıştırıp,datalarıKayıt altına alma işlemi gerçekleştirmektir.

3.1.1。运行Main:
AMAç:
- Bütün Modülleri Tek Bir Mainde Importlamak.
- Elde ettiğimiz modi test etmek.
- 测试sürüşündençıKan Sonuçlarımızıraporlamak。
算法:
- Kütüphaneler进口版。
- Açıdeğerlerimizin hosa siyer değerleri tanımlanır.
- 麦克斯。Hızımız ve Motor Pinleri tanımlanır.
- IçEriye型号导入版。
1.Fonksiyon(预处理):
- 雷姆勒在形状上‘I Belirlenir’I Belirlenir.
- Resimler BGR格式ından yuv格式ınaçevrilir。
- 高斯模糊埃克雷尔(Trashold)
- Resimler调整Edilir的大小。
- Resimler 0,1阿拉斯,ı,NA,比例尺,Edilir。
İsteğe bağlıolarak Joyticks modülünüaçık bırakıp Aracın yanlışBir hareketinde acil müdahale yapabilirsiniz.YAPılan Projede TensorFlow Gibi ağır Bir kütüphanenin Raspberry PiüzerindeçalıştırıLMASısağLanmıştır,fakat dönüşlerde kısa süreli Delay yaşand maktadır.Bunun Temel Nedeni TF Kütüphanesin in ağırçalışMasıve Raspberry Pi 3B+k.o Yazımıda Buradan Bulabilirsiniz
Yorumlarınıza ve eleştirilerinize açığım,zaman ayırıp okuduğunuz için teşEkkür ederim.
Berk Karabillioğlu Lunai创始人兼数据科学家
Kaynakça
原创文章,作者:fendouai,如若转载,请注明出处:https://panchuang.net/2021/07/22/%e8%a6%86%e7%9b%86%e5%ad%90pi-ile-yapay-sinir-agikullanimive-otonom-surusprojesi/
