
OpenCV-Python 系列 十八 | Canny边缘检测
本文是全系列中第50 / 63篇:OpenCV-Python
- OpenCV-Python 系列 四 | 视频入门
- OpenCV-Python 系列 十二 | 图像的几何变换
- OpenCV-Python 系列 二十 | 轮廓:入门
- OpenCV-Python 系列 二十八 | 直方图4:直方图反投影
- OpenCV-Python 系列 三十六 | 哈里斯角检测
- OpenCV-Python 系列 四十四 | 特征匹配 + 单应性查找对象
- OpenCV-Python 系列 五十二 | 理解K近邻
- OpenCV-Python 系列 六十 | 高动态范围
- OpenCV-Python 系列 五 | OpenCV中的绘图功能
- OpenCV-Python 系列 十三 | 图像阈值
- OpenCV-Python 系列 二十一 | 轮廓特征
- OpenCV-Python 系列 二十九 | 傅里叶变换
- OpenCV-Python 系列 三十七 | Shi-tomas拐角检测器和益于跟踪的特征
- OpenCV-Python 系列 四十五 | 如何使用背景分离方法
- OpenCV-Python 系列 五十三 | 使用OCR手写数据集运行KNN
- OpenCV-Python 系列 六十一 | 级联分类器
- OpenCV-Python 系列 六 | 鼠标作为画笔
- OpenCV-Python 系列 十四 | 图像阈值
- OpenCV-Python 系列 二十二 | 轮廓属性
- OpenCV-Python 系列 三十 | 模板匹配
- OpenCV-Python 系列 三十八 | SIFT尺度不变特征变换
- OpenCV-Python 系列 四十六 | Meanshift和Camshift
- OpenCV-Python 系列 五十四 | 理解SVM
- OpenCV-Python 系列 六十二 | 级联分类器训练
- OpenCV-Python 系列 七 | 轨迹栏作为调色板
- OpenCV-Python 系列 十五 | 图像平滑
- OpenCV-Python 系列 二十三 | 轮廓:更多属性
- OpenCV-Python 系列 三十一 | 霍夫线变换
- OpenCV-Python 系列 三十九 | SURF简介(加速的强大功能)
- OpenCV-Python 系列 四十七 | 光流
- OpenCV-Python 系列 五十五 | 使用OCR手写数据集运行SVM
- OpenCV-Python 系列 六十三 | OpenCV-Python Bindings 如何工作?
- OpenCV-Python 系列 八 | 图像的基本操作
- OpenCV-Python 系列 十六 | 形态学转换
- OpenCV-Python 系列 二十四 | 轮廓分层
- OpenCV-Python 系列 三十二 | 霍夫圈变换
- OpenCV-Python 系列 四十 | 用于角点检测的FAST算法
- OpenCV-Python 系列 四十八 | 相机校准
- OpenCV-Python 系列 五十六 | 理解K-Means聚类
- OpenCV-Python 系列 一 | 系列简介与目录
- OpenCV-Python 系列 九 | 图像上的算术运算
- OpenCV-Python 系列 十七 | 图像梯度
- OpenCV-Python 系列 二十五 | 直方图-1:查找、绘制和分析
- OpenCV-Python 系列 三十三 | 图像分割与Watershed算法
- OpenCV-Python 系列 四十一 | BRIEF(二进制的鲁棒独立基本特征)
- OpenCV-Python 系列 四十九 | 姿态估计
- OpenCV-Python 系列 五十七 | OpenCV中的K-Means聚类
- OpenCV-Python 系列 二 | 安装OpenCV-Python
- OpenCV-Python 系列 十 | 性能衡量和提升技术
- OpenCV-Python 系列 十八 | Canny边缘检测
- OpenCV-Python 系列 二十六 | 直方图-2:直方图均衡
- OpenCV-Python 系列 三十四 | 交互式前景提取使用GrabCut算法
- OpenCV-Python 系列 四十二 | ORB(面向快速和旋转的BRIEF)
- OpenCV-Python 系列 五十 | 对极几何
- OpenCV-Python 系列 五十八 | 图像去噪
- OpenCV-Python 系列 三 | 图像入门
- OpenCV-Python 系列 十一 | 改变颜色空间
- OpenCV-Python 系列 十九 | 图像金字塔
- OpenCV-Python 系列 二十七 | 直方图-3:二维直方图
- OpenCV-Python 系列 三十五 | 理解特征
- OpenCV-Python 系列 四十三 | 特征匹配
- OpenCV-Python 系列 五十一 | 立体图像的深度图
- OpenCV-Python 系列 五十九 | 图像修补
目标
在本章中,我们将学习
- Canny边缘检测的概念
- OpenCV函数: cv.Canny()
理论
Canny Edge Detection是一种流行的边缘检测算法。它由John F. Canny发明
- 这是一个多阶段算法,我们将经历每个阶段。
- 降噪
由于边缘检测容易受到图像中噪声的影响,因此第一步是使用5×5高斯滤波器消除图像中的噪声。我们已经在前面的章节中看到了这一点。
- 查找图像的强度梯度
然后使用Sobel核在水平和垂直方向上对平滑的图像进行滤波,以在水平方向(Gx)和垂直方向(Gy)上获得一阶导数。从这两张图片中,我们可以找到每个像素的边缘渐变和方向,如下所示:
$$
Edge_Gradient ; (G) = sqrt{G_x^2 + G_y^2} Angle ; (theta) = tan^{-1} bigg(frac{G_y}{G_x}bigg)
$$渐变方向始终垂直于边缘。将其舍入为代表垂直,水平和两个对角线方向的四个角度之一。
-
非极大值抑制
在获得梯度大小和方向后,将对图像进行全面扫描,以去除可能不构成边缘的所有不需要的像素。为此,在每个像素处,检查像素是否是其在梯度方向上附近的局部最大值。查看下面的图片: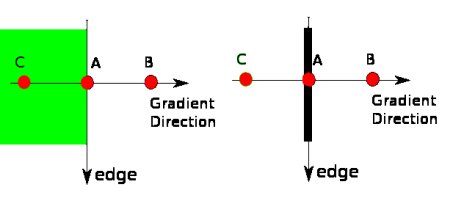
点A在边缘(垂直方向)上。渐变方向垂直于边缘。点B和C在梯度方向上。因此,将A点与B点和C点进行检查,看是否形成局部最大值。如果是这样,则考虑将其用于下一阶段,否则将其抑制(置为零)。
简而言之,你得到的结果是带有“细边”的二进制图像。 -
磁滞阈值
该阶段确定哪些边缘全部是真正的边缘,哪些不是。为此,我们需要两个阈值
minVal和maxVal。强度梯度大于maxVal的任何边缘必定是边缘,而小于minVal的那些边缘必定是非边缘,因此将其丢弃。介于这两个阈值之间的对象根据其连通性被分类为边缘或非边缘。如果将它们连接到“边缘”像素,则将它们视为边缘的一部分。否则,它们也将被丢弃。见下图: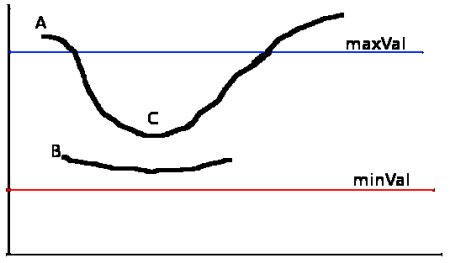
边缘A在
maxVal之上,因此被视为“确定边缘”。尽管边C低于maxVal,但它连接到边A,因此也被视为有效边,我们得到了完整的曲线。但是边缘B尽管在minVal之上并且与边缘C处于同一区域,但是它没有连接到任何“确保边缘”,因此被丢弃。因此,非常重要的一点是我们必须相应地选择minVal和maxVal以获得正确的结果。在边缘为长线的假设下,该阶段还消除了小像素噪声。
因此,我们最终得到的是图像中的强边缘。
OpenCV中的Canny Edge检测
OpenCV将以上所有内容放在单个函数cv.Canny()中。我们将看到如何使用它。第一个参数是我们的输入图像。第二个和第三个参数分别是我们的minVal和maxVal。第三个参数是perture_size。它是用于查找图像渐变的Sobel内核的大小。默认情况下为3。最后一个参数是L2gradient,它指定用于查找梯度幅度的方程式。如果为True,则使用上面提到的更精确的公式,否则使用以下函数:$Edge_Gradient ; (G) = |G_x| + |G_y|$。默认情况下,它为False。
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt
img = cv.imread('messi5.jpg',0)
edges = cv.Canny(img,100,200)
plt.subplot(121),plt.imshow(img,cmap = 'gray')
plt.title('Original Image'), plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(edges,cmap = 'gray')
plt.title('Edge Image'), plt.xticks([]), plt.yticks([])
plt.show()
附加资源
- Canny edge detector at Wikipedia:http://en.wikipedia.org/wiki/Canny_edge_detector
- Canny Edge Detection Tutorial:http://dasl.unlv.edu/daslDrexel/alumni/bGreen/www.pages.drexel.edu/_weg22/can_tut.html by Bill Green, 2002.
练习
- 编写一个小应用程序以找到Canny边缘检测,该检测的阈值可以使用两个跟踪栏进行更改。这样,您可以了解阈值的影响。
原创文章,作者:磐石,如若转载,请注明出处:https://panchuang.net/2020/03/03/opencv-python-%e7%b3%bb%e5%88%97-%e5%8d%81%e5%85%ab-canny%e8%be%b9%e7%bc%98%e6%a3%80%e6%b5%8b/
